| Python ゲームソフト |
子どもパソコン IchigoJam |
PICマイコン | 電子工作の基本 | アセンブラ入門 | プログラムのダウンロード | 問い合わせ | My Photo のコーナー My Audio |
中学数学 算数物語 |
|
本に掲載されているプログラムをダウンロードするページです。
また、本の内容や下に紹介する製作例に関するご質問等ありましたら、気軽にお問い合わせください。



 表紙をクリックすると 100の項目が表示されます |
BookⅣ(2010/11) わかる!電子工作の基本100 秀和システム 本書はラジオ、ステレオ等のアナログから、最近の先端を行くデジタルそしてマイコンまで、電子工作全般の基本的なことがらを、マメ百科として活用できるように100項目にまとめました。私自身がつまずき、悩んだことがらを、小中学生にも分かるように、できるだけ簡単に読みやすく書きました(ただし、ほんの少し高校の数学を必要とする箇所があります)。 掲載した回路等は、私自身のオリジナルのものは勿論、旧来からあるものも全て実際に製作し確認したものです。 <目次> Chap.1.楽しい電子工作を始めるにあたって Chap.2.知るほどに興味深い『電気の基本』 Chap.3.電気回路の主役たち Chap.4.親しみやすくて実用的なアナログ Chap.5.限りない可能性を秘めたデジタル Chap.6.知っておきたい電子回路の基礎知識 Chap.7.誰にでもすぐに始められる『マイコン』の活用法 |
『電子工作の基本』補記 (←本文はこちら) (本には書かれていないことで、その後思いついたことなどを随時書き込んでいきます) <主な項目> ★趣味の始まり ★ハンダごて ★ICやマイコンの足を折ってしまったら ★ICやマイコンのソケット ★コンデンサのはたらき(追加) ★IchigoJamのキーボード(書き換え) ★アンプIC ★ワイヤレスマイク(改訂版) ★自作可能 Hi-Fi ミニステレオ ★人気のArduino、ESP32、ラズベリーパイに関して ★PICマイコンで使われるアセンブラ ★私がPICマイコンに取り組んだ訳 ★サーボモータについて(知っておきたいこと) (2024.1.25) |
|
★★★ 「電子工作」が全く初めてという方のためのページ ★★★ 上の本は、全くの初心者には分かりにくいという感想・意見がありました。 おそらく、見慣れない回路図のせいと思われます。私自身も小学生の頃は 実体図を頼りにしていましたが、慣れれば回路図の方が断然見やすいですし、 自分でパーツの配置を考えながら制作した方がやりがいがあります。 そこで、ブレッドボードを用いてLEDを点灯させるところから分りやすく説明しようと思います。 (2024.1.25) 本文はこちら |
|
 Python によるゲームソフトです。 Python がインストールされているパソコンなら、大抵動きます。 ファイル(圧縮)をダウンロードし展開すれば、フォルダ内の「*.py」をダブルクリックすることで Python が起動し開始します。 対戦型では、「W」、「S」、「A」、「D」キーと方向キーで対戦します。 ボールを投げる、サーブを打つなどはスペースキーです。 同一のプログラムが二つ入っているので、一つを保守用としてどんどん手を加えてみてください。 私はPythonを学術的な分野で活用できるほどには習得していません。 下にあるような子ども向けのゲームソフトなら、誰でも少し勉強すれば作ることができるようになります。 私が参考にしたのは、廣瀬豪氏著の「Pythonでつくるゲーム開発入門講座」です。 |
|
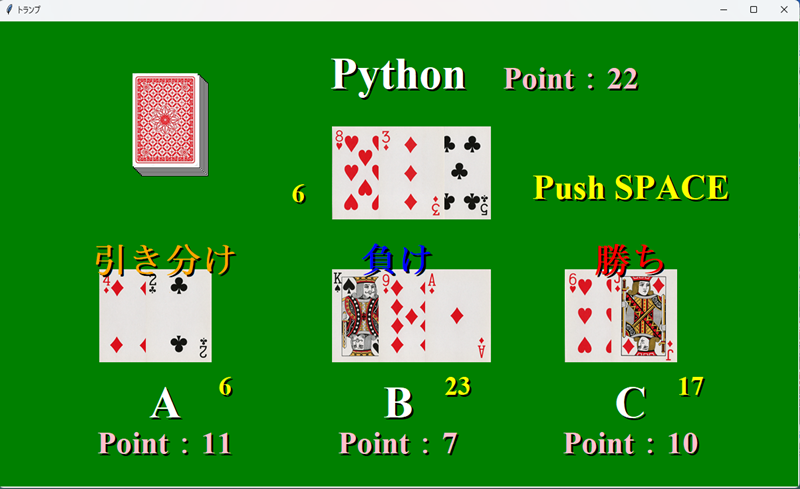 親のPythonと三人の子が対戦するカードゲーム。 二枚または三枚のカード(どちらにするかは各自で決める)の合計の、一の位の数で勝負する。 9に近い方が勝ち。 (『オイチョカブ』を簡略化したもの) ファイル(圧縮)はこちら |
|
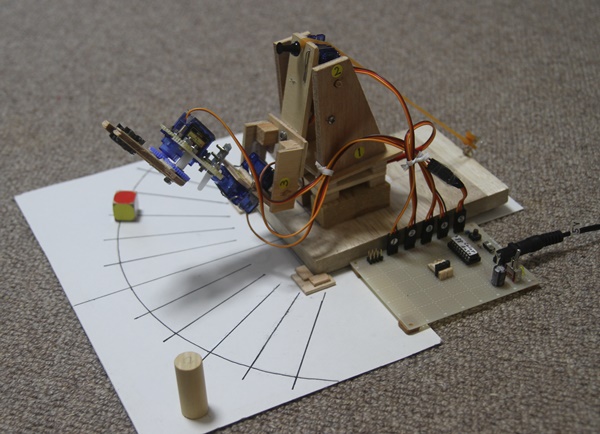
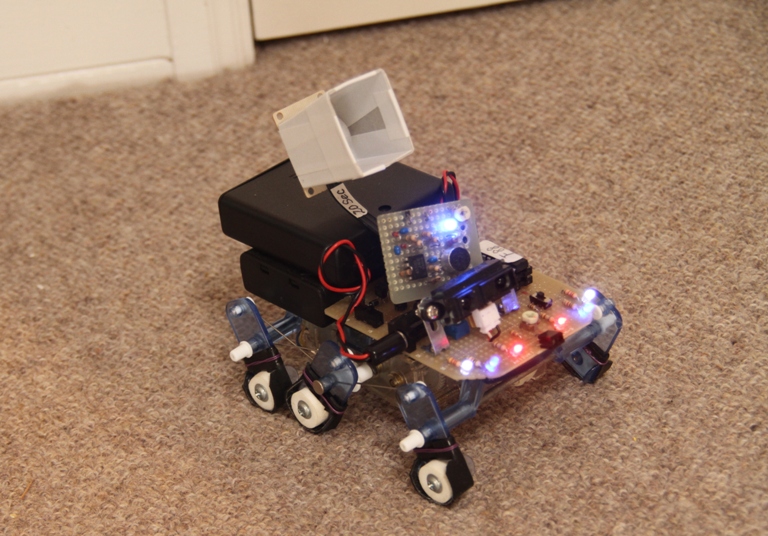
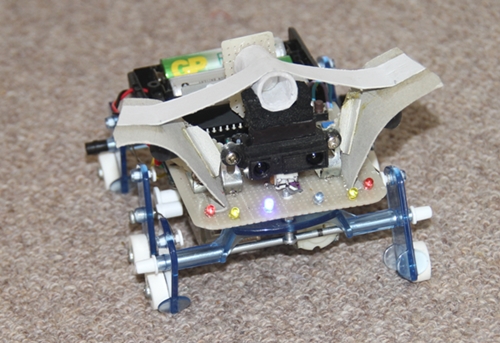
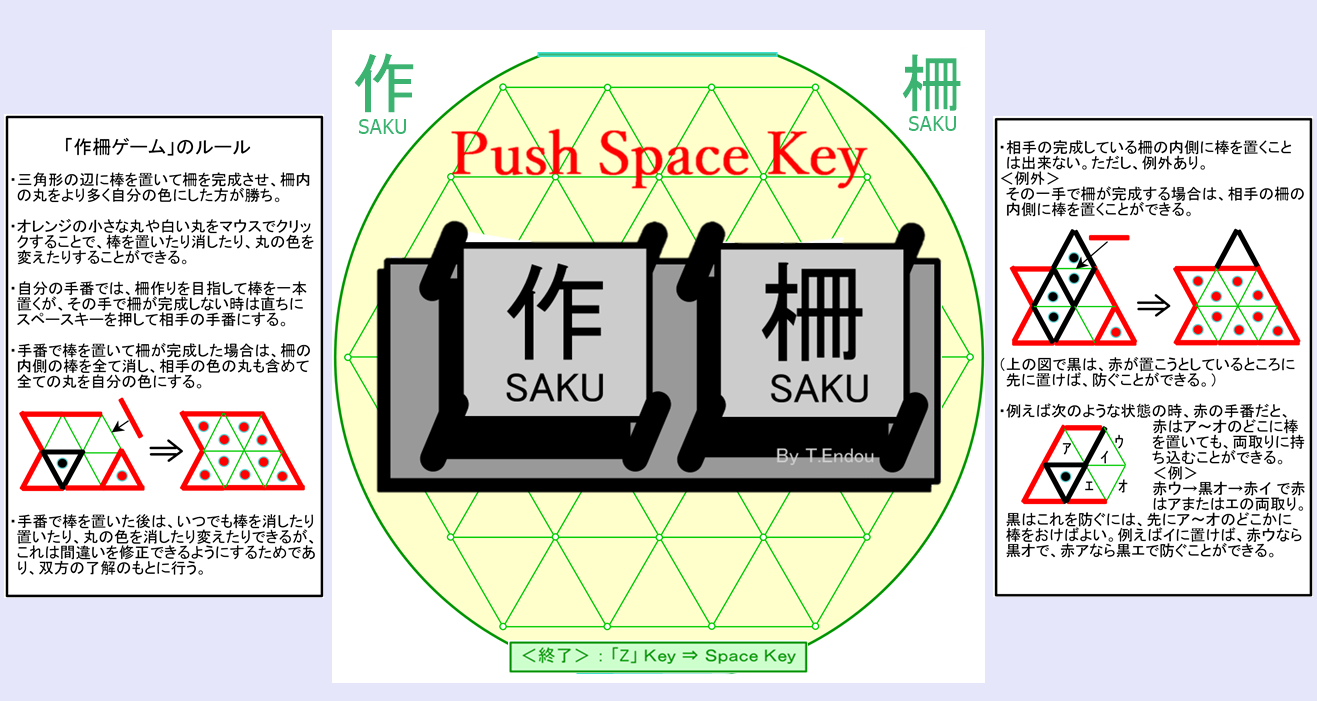 自身で創作した「作柵」というゲーム。将棋や囲碁のように二人で対戦する。棒を交互に置いて柵を作り、 より広いエリアを確保した方が勝ち。囲碁に似ているが、囲碁のような難しいルールではなく、 小さい子にも分かりやすい。現物で作るのは大変なので(下の写真)、Pythonで作ってみた。 下はある対戦の途中の図。終盤へきてゲームは大きく動く。 ファイル(圧縮)はこちら 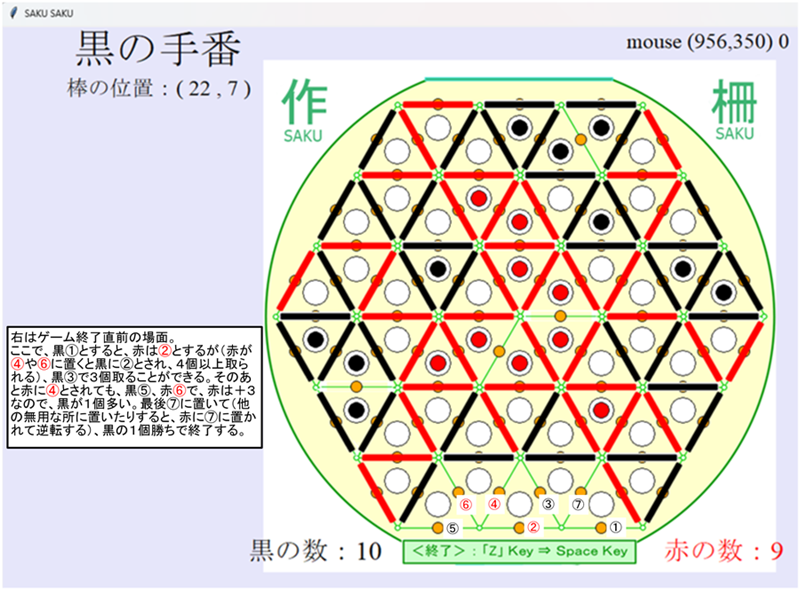  |
|
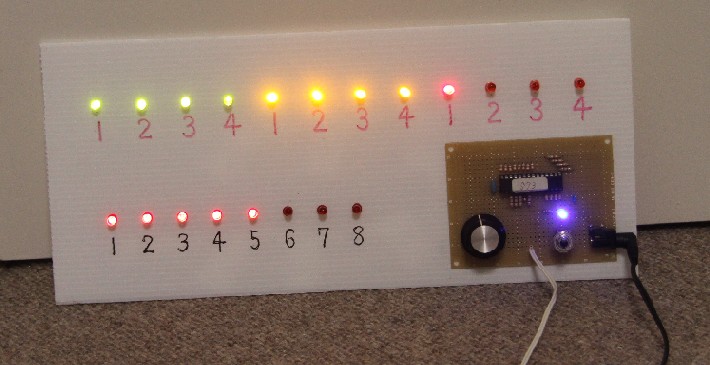
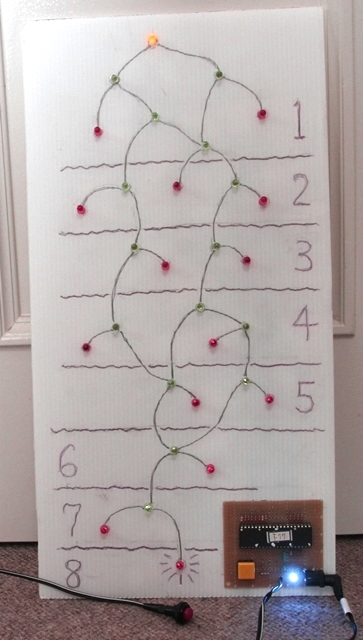
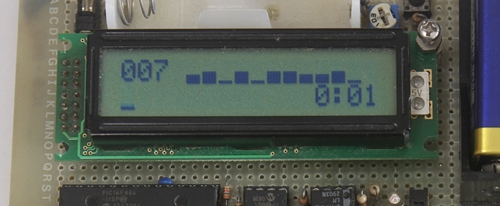
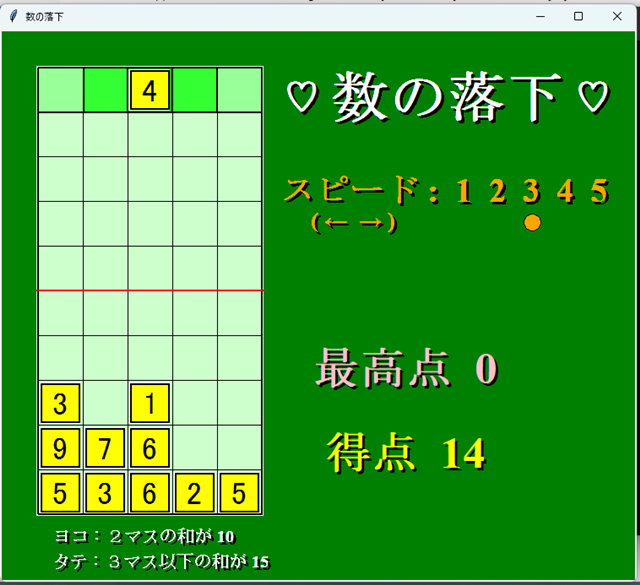 最上段の中央に数が現れ、数秒後に落下が始まる。落下が始まる前に「←」、「→」で列を決める。 下に落ちた数は、横隣の数との和が10のとき、縦並びの2個ないし3個の数の和が15のとき、消える。 いずれかの列が赤線を超えるとゲーム終了。スタートする前に落下が始まるスピードを変えられる。得点は落下した数の個数。 ファイル(圧縮)はこちら |
|
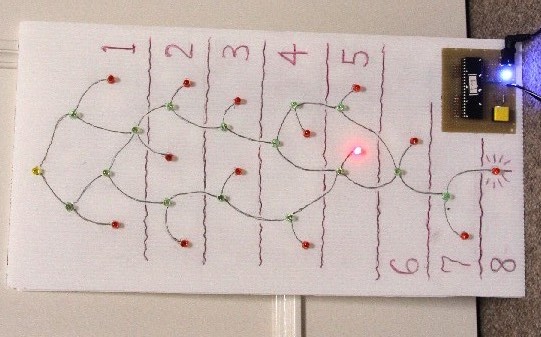
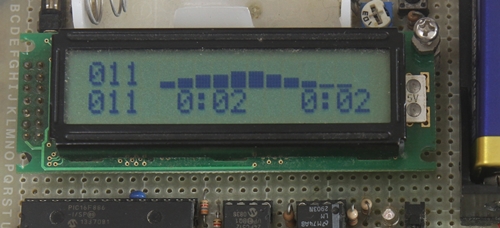
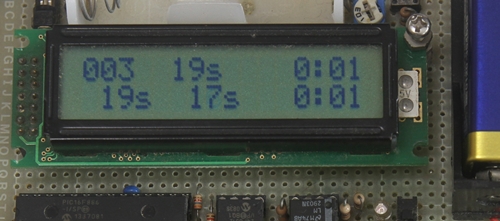
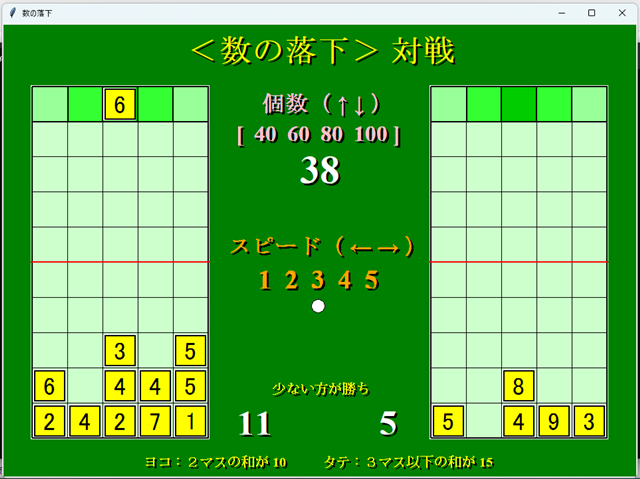 上のゲームを対戦型にした。数が交互に落ちる。始める前に勝負する個数とスピードを決める。赤線を超えたら途中でも終了で負け。 全部落下した時の数の個数が少ない方が勝ち。 ファイル(圧縮)はこちら |
|
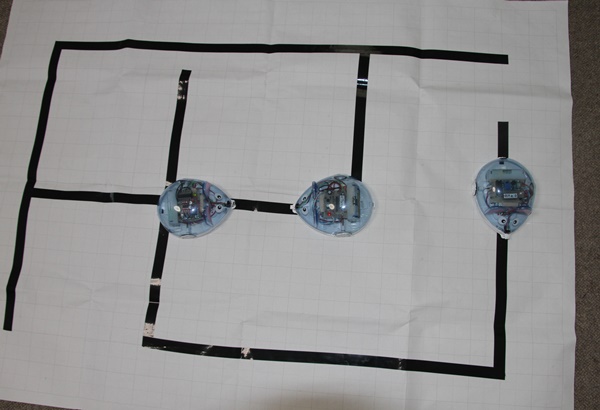
 迷路の中にある自分と同じ色の玉を早くすべてゲットすることを目指す。カボチャお化けにぶつかるとスタート地点に戻される。 茶色のカボチャは決まったエリアを動くが、緑のカボチャは後を追いかけてくる。時間内に多くをゲットした方が勝ち。 双方が全てをゲットした場合は残り時間の多い方が勝ち。 動きの基本は上記書籍の「はらはらペンギンラビリンス」(とてもよく作られている)を参考にした。 カボチャは「ホームページビルダー」にあったものを拝借し、ダルマは「Dynamic Draw」で作画し、 「Word」で背景を消した。 ファイル(圧縮)はこちら |
|
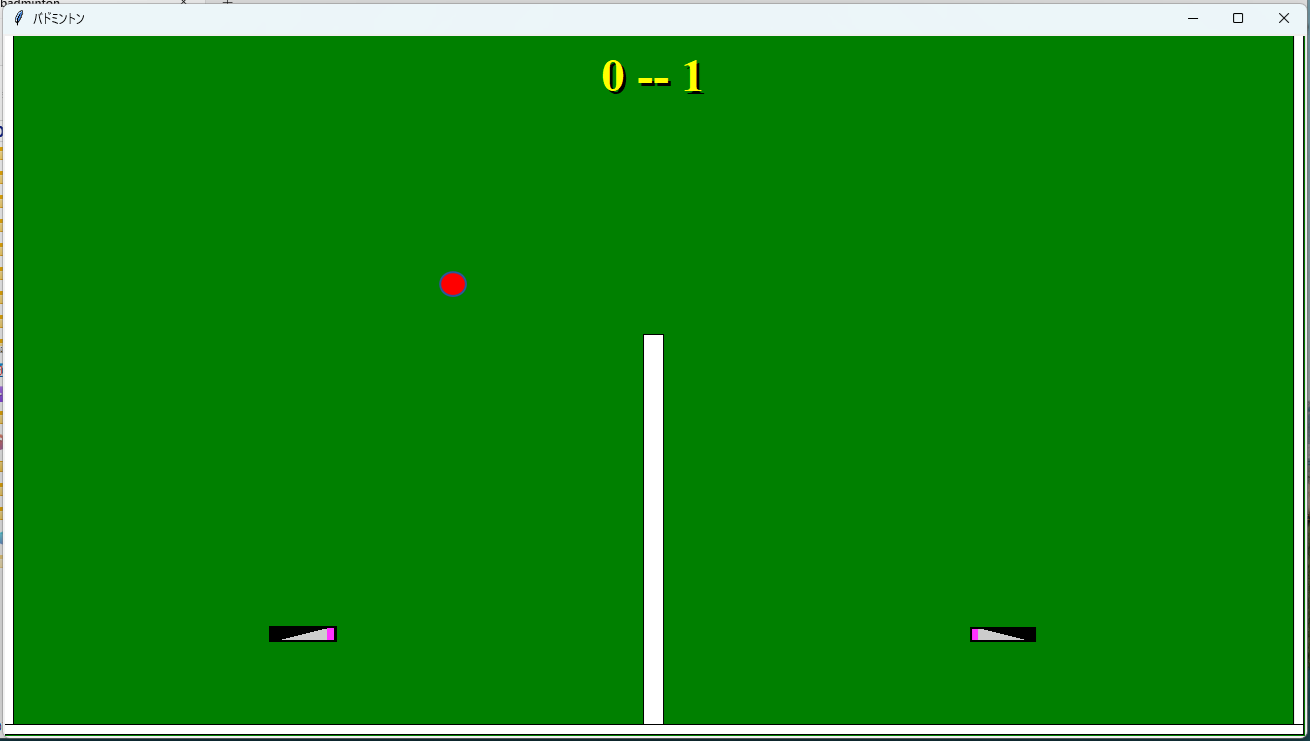 シャトルの代わりに赤い球を打ち合うバドミントン。ラケットの黒の多い部分に当てるほど球は高く打ち上げられる(天井の上に消える)。 ネットより高い位置でピンクの部分に当てると、スマッシュとまでは行かないがフェイントのように落とすことができる。 ファイル(圧縮)はこちら |
|
 スペースキーを押すと、左下の方から赤い球が飛んでくる(放物線軌道で)。 一旦ラケットで受け、右の壁に跳ね返った後再度ラケットに当てて、左下の的を狙う。 左上は最初に打ち上げられるときの放物線の方程式。打ち上げる前に、プレーヤーの対戦相手が x二乗の係数a および、x-b のb の値を変えられる。 ファイル(圧縮)はこちら |
|
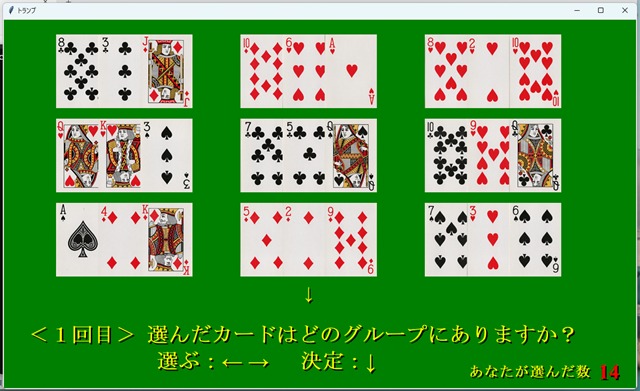 27枚のカードから上のような操作を3回繰り返して、最初に決めたカードを見つけるという定番のマジック。 選んだカードとは別に、選んだ数(右下)の回数だけめくると決めたカードが出る。 ファイル(圧縮)はこちら |
|
 選んだカードを見つけ出すというやはり定番のマジック。単純なしかけあり。 ファイル(圧縮)はこちら |
|
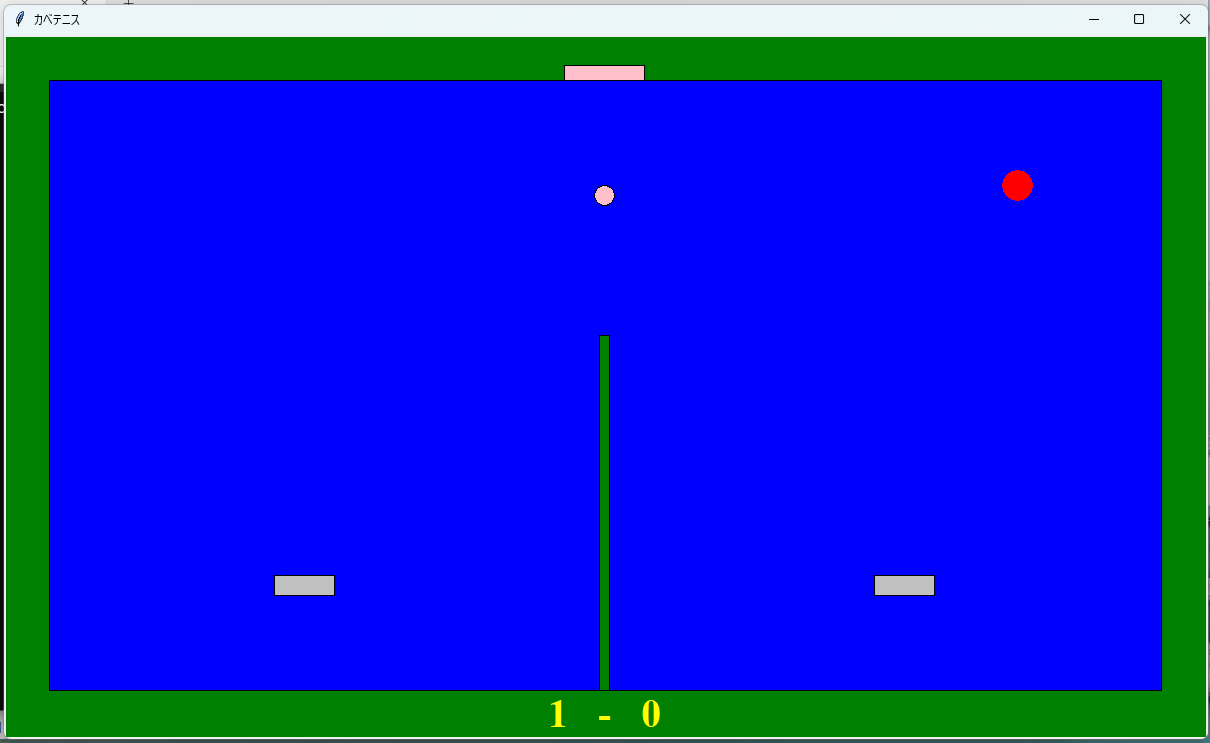 赤い球を打ち合う壁テニス。中央のピンクの丸に触れると、球の角度とスピードが変わる。天井のピンクに当てると+3ポイント。 ファイル(圧縮)はこちら |
|
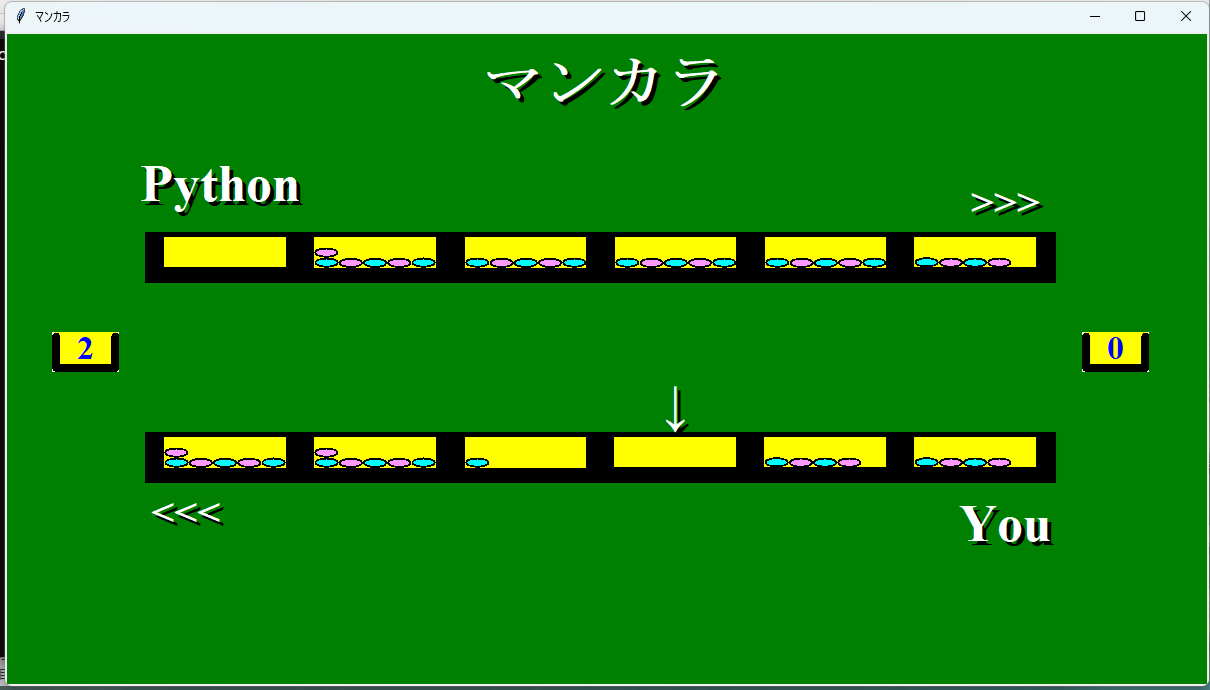 Python と対戦するマンカラ。Pythonはそれほど強くないが、なめてかからない方がよい。 箱の選択は「→」「←」、決定は「↓」キーで。 ファイル(圧縮)はこちら 人対人はこちら |
|
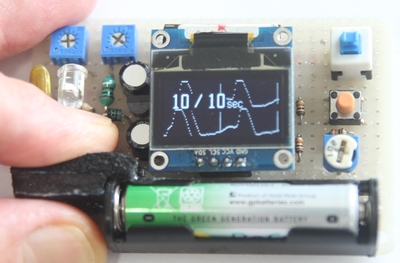
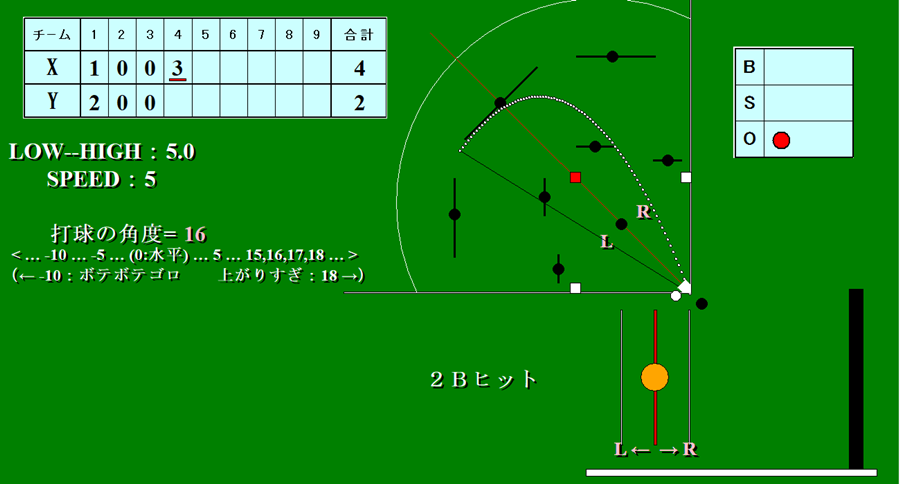 守備側のピッチャーは「Spaceキー」で投球。その際、「E」、「D」で高さを、「S」、「F」でスピードを変えられる。 投球されたボール(白い球)は画面の下の方の左から飛んでくる。 バッター(橙色の丸がバットの断面)は、ボールに合わせて「↑」、「↓」でバットの高さを変え、「←」でタイミングを合わせてスイングする。 ピッチャーは全てストライクのボールを投げてくる。バッターは皆右打者で、当てるタイミング、角度がよいとホームランもあり。 ファイル(圧縮)はこちら |
★★ここで使われる言語『BASIC』はプログラミングの入門に最適です |
|
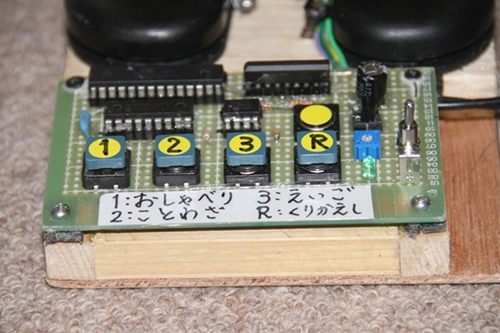
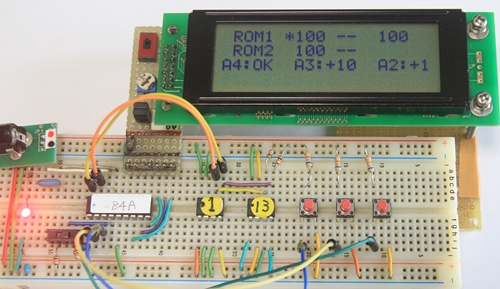
 IchigoJam プログラム 1 |
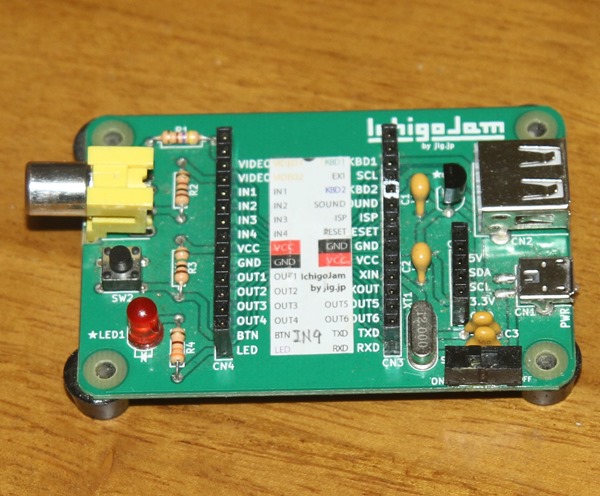
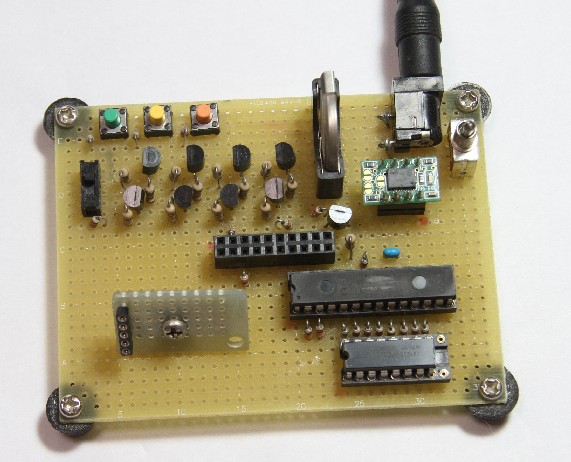
 IchigoJam自作基板 実体回路図 / 説明 |
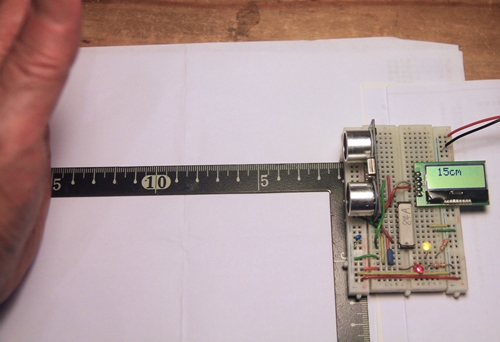
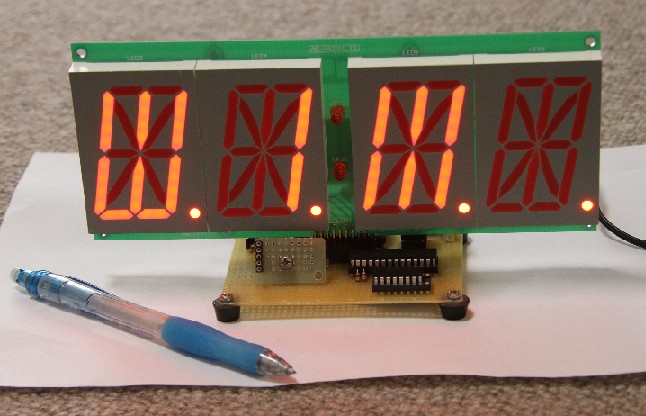
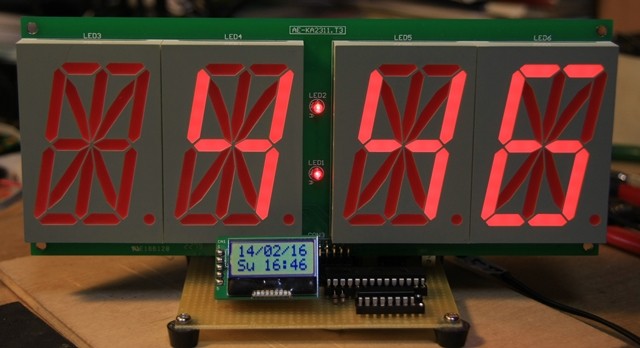
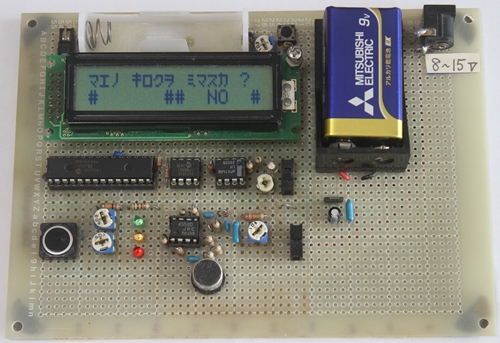
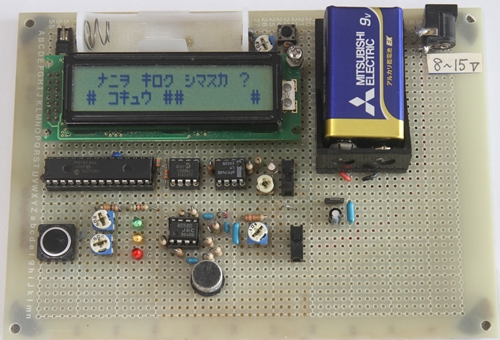
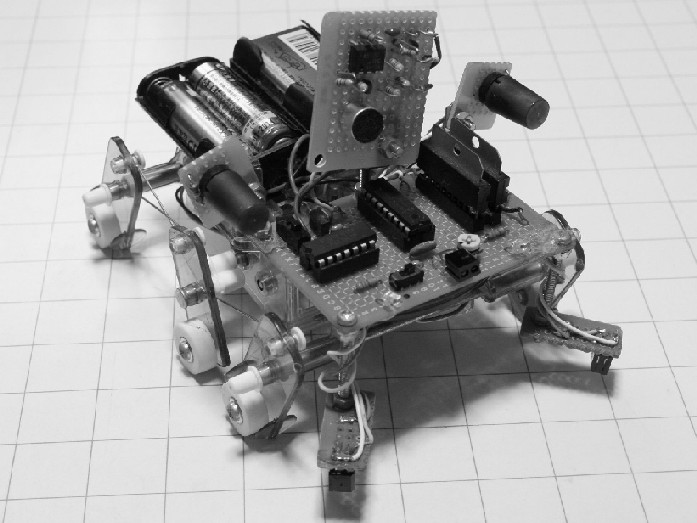
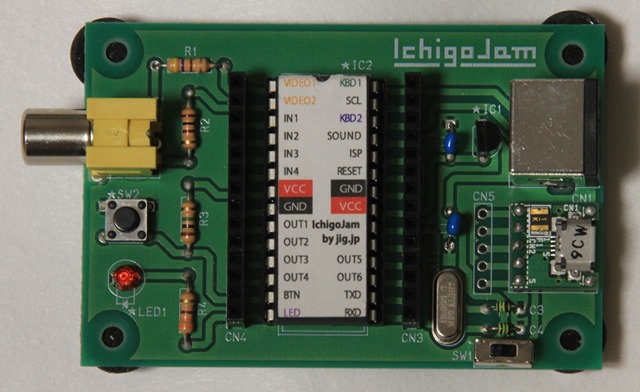
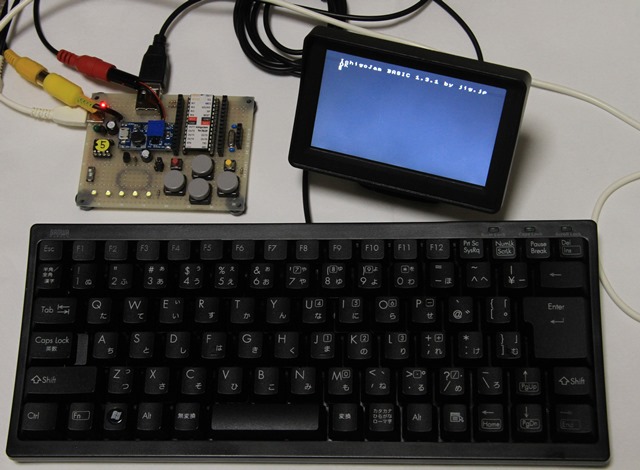
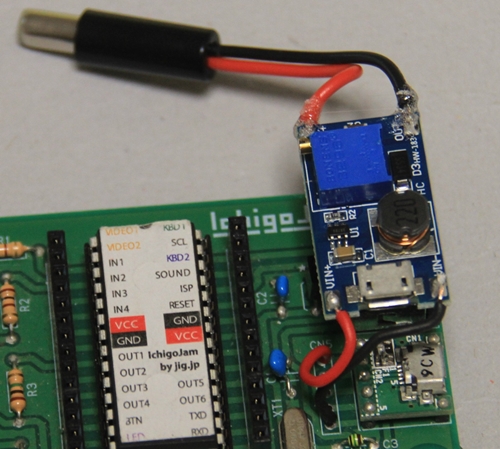 基板右上のパーツはモニターの電源用で、「HiLetgo 2A DC‐DC ブーストステップアップモジュール」です。キーボード用ソケットの上に貼り付けています。写真のように入力を5Vにつなぐと、簡単に12Vが作ることができます(テスターで電圧を見ながらネジで調整)。安価でとても高性能です。ただしこの際、その下の電源入力基板にある小さなパーツ(これはヒューズ)をショートする必要があります。このヒューズは基板に大きな電流が流れた時にカットする働きをしますが、右の写真のようにモニターをつなぐと、200mA程度の電流が流れるので、ヒューズが動作してIchigoJamが起動できなくなります。 補足)今回用いたモニターは車用なので、車のバッテリー電圧(12V)に合わせていますが、試してみると6.5Vくらいから使えます。その時には電流は400mA程度流れます。 IchigoJamで使われるのはもっとも基本的なBASICと呼ばれるプログラム言語ですが、BASICでプログラミングを経験しておくと、先へいってどのプログラム言語に取り組む場合にも基本となるものは変わらないので、大いに役に立ちます。 |
 子どもパソコン「IchigoJam」を子どもでも手軽に手に入れられるように、できるだけ安く組み上げたのが上の写真です。キーボード(PS2タイプ)およびモニター(車用)はどちらも千円ちょっとで購入したものであり(中古品で見つかればもっと安い!)、モニター用の電源(普通は12V程度のACアダプターを用いる)も左にあるようにしたのでかなり安上がりでコンパクトに作れます。電源は今ならどの家庭にもある携帯用が使えます(ただし差し込み口は楕円ではなく台形のタイプ)。一つ用意しなければならないのは、基板とモニターをつなぐコードです。オーディオで使われているRCAというタイプのコードですが、基板もモニターもメスのタイプなので両端がオスのタイプのコードが必要です(上の写真では途中を切断した短いコードを使用)。なお、モニターはTVでも、DVDプレーヤーでも、ビデオ端子(一般的に黄色)があれば使えます。中央のICの上にあるのは外付けのメモリー(EEPROM)で、これに関しては少し知識が必要です。トライしてみたいという場合は上の記事(回路図)を参考にしてください。既製品も売られています。 |
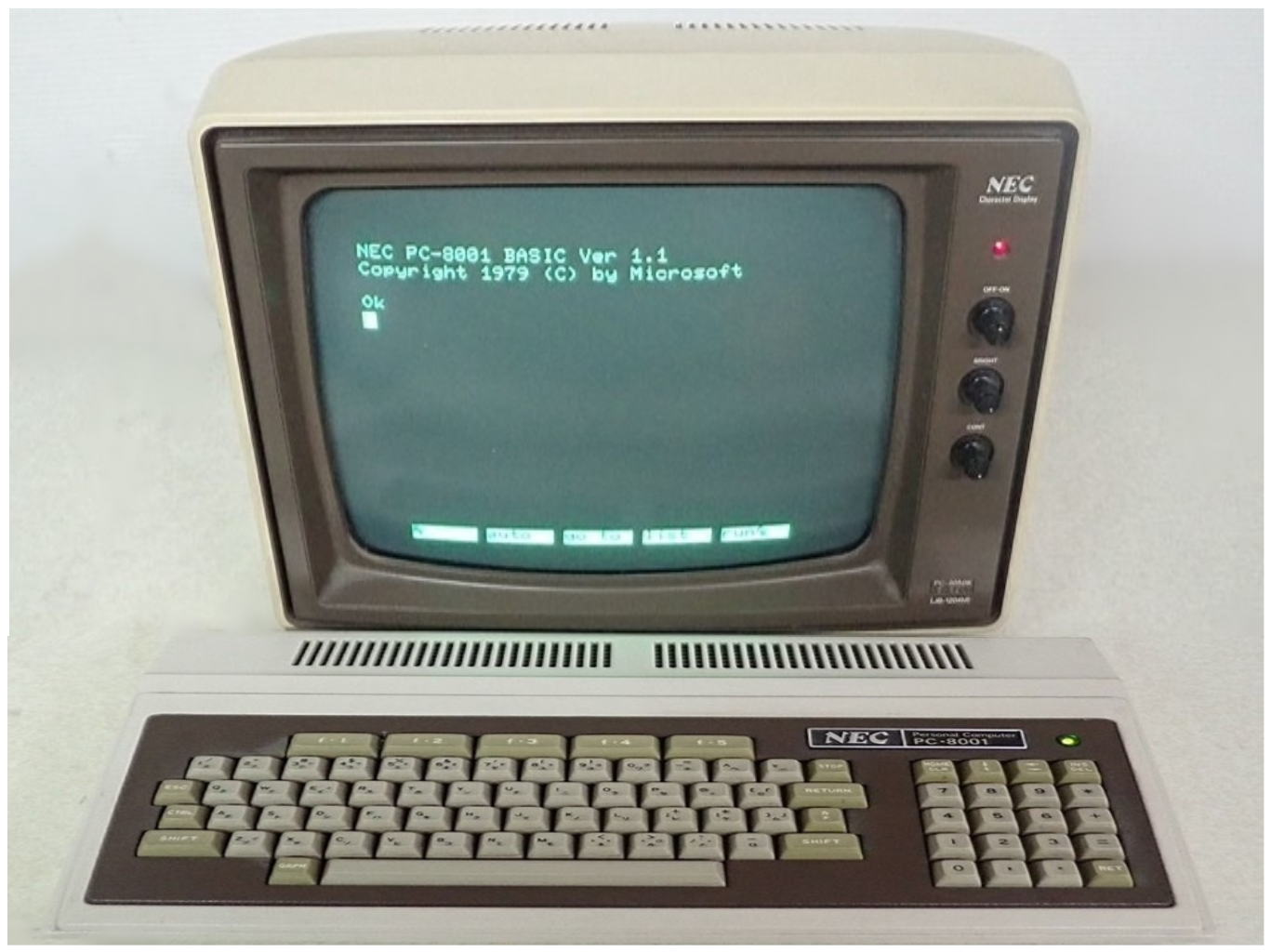
| 右の写真はNECの最初のPC(パーソナルコンピュータ)として登場したPC-8001というコンピュータで、私が手に入れたのは1980年ころです。キーボード下の本体にCPUやRAM、ROMといったパーツを搭載した基板が組み込まれています。ディスプレーは今と違ってブラウン管によるものなので、かなり奥行きがあり場所をとりました。内蔵されたRAMは16k(32kまで増設可)です。またプログラムの外部への保存はカセットテープで、保存や再生にはラジカセを用いました。まだWINDOWSやその前のDOSと言ったものはなく、一般的にプログラムの作成は本体に書き込まれたBASICを活用しました(マシン語でというつわものもいましたが)。ディスプレーも含めた価格は当時の私の一か月分の給料では遠く及ばず、気軽に手に入れられるものではありませんでした。また発売当時は当然ですがいわゆるアプリ(ソフト)は売られていないので、必要なものを自分で作るというのが当たり前でした。今思えばプログラミングが楽しく感じられる懐かしい時代です。 IchigoJamはこのコンピュータとほぼ変わらない機能を(もちろん及ばない点もいくつかあるが)、上にあるように小さな緑色の基板一つで実現しているわけです。しかも子どもでも小遣いで買えそうな価格です。基板上のICにはCPUはもちろん、各種メモリー等全てのものが組み込まれており、さらに驚きなのはBASICまで書き込まれていることです。また作成したプログラム64kバイト分を、簡単に抜き差しできる外部メモリー用IC(EEPROM)に保存できます(本体には4kバイト分保存可能)。 |
 |
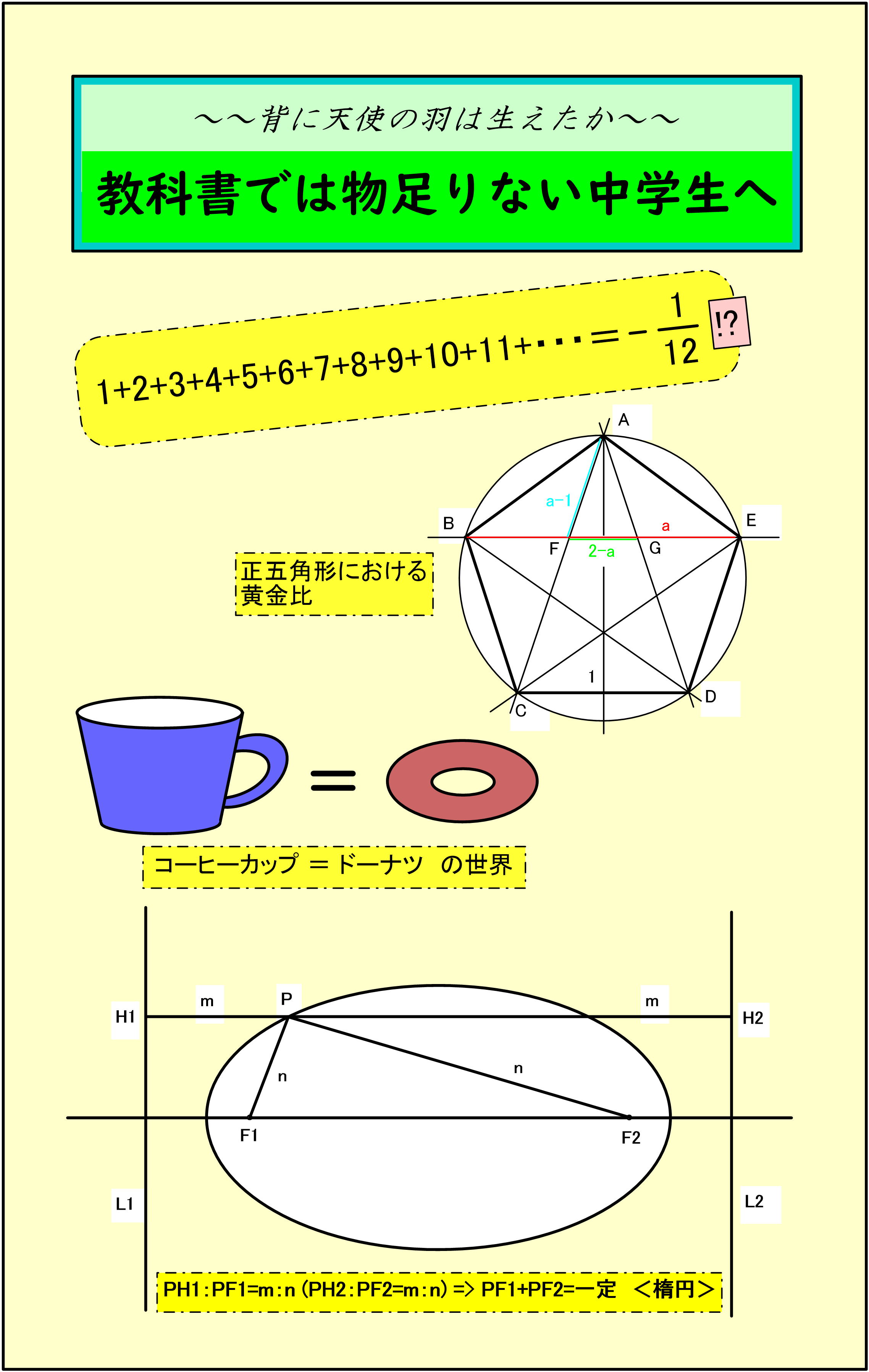
『マチ子先生とトボ僧の算数物語』、『教科書では物足りない中学生へ』 書き改めました(2023.10.12)
  |
マチ子先生は元高校の数学の先生。 トボ僧は小学4年生の男の子。ちょっと変わった性格だが、算数(数学)に関してはとびきり優れた頭脳の持ち主。 私はトボ僧の姉。私たちはある時偶然公園でマチ子先生と出会い、それをきっかけにマチ子先生が問題を出し、トボ僧(一応私も)が解くという関係が始まった。 問題は私には手に負えないものばかりだが、弟は次々と解決していく。 小学生にもわかるけど、大人にも分からない問題の数々。 問題は昔からあるよく知られたパズルの問題や、マチ子先生が独自に用意したものなどいろいろ。 本文はPDFファイルです。見開き(2ページ)にすると、左側が本文、右側が図や解説となっていて読み易いです。 本文はこちら |
 『微分法』・『積分法』そして『複素平面』の話題も登場します |
表題にあるように、学校の教科書では物足りなく感じている中学生向けに、学校の授業では扱われないような話題や、高校で習う数学の基本の部分をまとめました。 数式を一切使わない問題もあります。どちらかというと、国語の問題ではないかと思われるものもありますが、やはり数学的な思考で解く問題です。 高校で習うことを先取りすることの意味は、科学の啓もう書などを手にした中学生が、より興味深く読み進められるようにということからです。 私自身次のような経験があります。 ジョージ・ガモフという物理学者が著した『1,2,3,・・・無限大』という本を中学時代に読んだのですが、その中にあった「虚数を使う宝探し」の問題を、その時には理解できずにいました。でも、高校で複素数・複素平面を習うことによって初めて理解できるようになったのです。 また、左にある 1+2+3+・・・ と自然数を無限に足していくと、-1/12 になるという奇妙な等式。私は正直理解できるところまで挑戦していませんが、皆さんの中には将来挑戦して理解できる人もでてくるでしょう。 正五角形の作図法は?出来上がった正五角形は『黄金比』だらけです。正五角形が美しいわけが分かります。 「コーヒーカップ=ドーナツ」の世界も興味深いです。一筆書きの問題や、この世には正多面体は5個しか存在しえないことの証明につながります。いわゆる『トポロジー(位相幾何)』と呼ばれる数学の分野の話です。 ラグビーボールは楕円球と呼ばれます(つまり楕円の回転体)。また太陽の周りを回る地球は楕円軌道を描きます。楕円とは何か。どのように定義されるのか。円には中心がありますが、楕円には焦点と呼ばれる二つの定点があります。楕円の焦点はどのような性質をそなえているでしょう。 本文は下をご覧ください |
目次のページが開きます (本文はPDFファイル) 下は目次の一部
§01.なぜエレベーターには0階が無いのか(数が意味する2つのこと)
§1.数学における絶対的なる掟(0で割るな) §2.背に天使の羽は生えたか(見えないものを推理する)
§3.常識で理解できるか(人知を惑わす確率の問題) §4.窓は開け放つべきか(期待値の功罪)
§5.異質な玉を天秤で見つけよ(4個の場合は3回、12個の場合も3回?) §6.3人による文句なしの山分け(ねたみも生じない分け方は可能か)
§7.この世には5個しか存在せず(「コーヒーカップ=ドーナツ」の世界) §8.自然界の神秘を数学的に解明する(フィボナッチの数列)
・
・
・
§28.自然数を無限に足していくと不思議なことが起きる(1+2+3+4+・・・) §29.プログラミングとフローチャート(いかなる言語にも共通する基本)
マイコン活用の電子工作のために必要なのは
・マイコンにプログラムを書き込めるようになること
・電子工作の基本を習得すること
・何を作るかというアイデア
の三つです
★マイコンって何
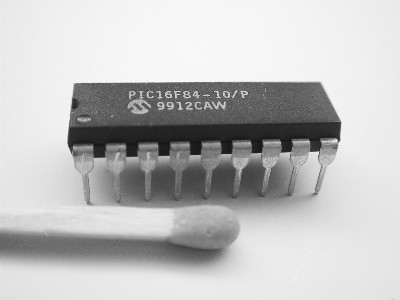
★PICマイコンの特徴 ★PICマイコンの外観 ★主なPICマイコン
★PICマイコンでどんなことができるか
★PICマイコンの開発はどのように行われるのか
★用意すべきもの ★秋月電子の紹介
★最も代表的なPICマイコン「16F84A」について
★どんなことが分るようになればよいか
★PICマイコンの少々扱い難い構造について ★「MPLAB IDE」について
★「MPASM」はどんなアセンブラか
★インストールした「MPLAB」が起動しないとき
★マイクロチップ社のMPLABをダウンロードしたりPICマイコンのデータを調べたりするには
★PICマイコンにおける高級言語(C、BASIC)について
★マイコンがもっとも有用に活用されるI2C通信、UART通信、SPI通信について
★アセンブラ(MPASM)を用いて16F84Aでどこまでできるか
★PICを基板等に実装したままプログラムを書き込む方法
★AKI-PICプログラマーをWin10のPCで使うには
★PICKit3の書込みでエラーになる場合
★各種センサの紹介